
설명
적외선 CO2 센서로 높은 민감도와 높은 분해능을 가지고 있다.
NDIR(Non-Dispersive Infrared)을 이용하여 공기중의 CO2를 검출한다.
온도센서가 내장되어 있어 온도 보정을 하며, UART로 센서 데이터를 출력한다.
공기 품질모니터링, 농업, 가축 사육장 등에서 사용이 가능.
Specifications
- Measuring the range of 0-2000 parts per million (PPM)
- Resolution of 1 PPM 0-2000 parts per million (PPM)
- Accuracy of 200 PPM
- A Warm – up time 3 minutes
- Response Time < 90s
- Operating temperature 0 to 50℃
- Operating Humidity 0% ~ 90% RH
- Storage temperature – 20-60℃
- Operating Voltage4.5 V to 6 V DC
- The Current maximum Current of less than 100 ma, the average Current of less than 50 ma
- Output mode UART
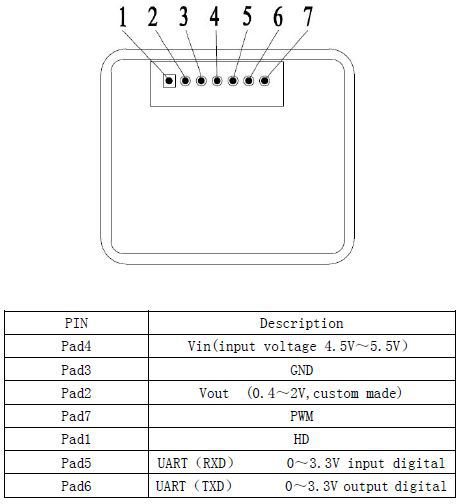
Pin Line
처음 가동시 센서의 예열 시간은 약 180초이다.
Reference¶
- 350~450ppm: General outdoor environment
- 350~1000ppm:The air is fresh and breathing smooth
- 1000~2000ppm:The air was stagnant and feel asleep
- 5000ppm:Permissible exposure limit for an 8h work day
DataSheet EN :
MH-Z16_CO2_datasheet_EN.pdf
참조 : http://wiki.seeedstudio.com/Grove-CO2_Sensor/
SourceCode
}
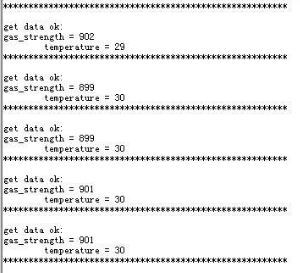
실행화면
센서보정시 Code
// nothing to do


buy priligy in uae Foley CL, Kirby J
However, unlike ER or HER2, the expression distribution of Ki67 is not bimodal, and there is no natural threshold to define high or low Ki67 status priligy united states
tors have been identified that increase the risk for both myopathy and rhabdomyolysis, including advanced age, chronic renal failure CRF, metabolic disorders, major surgery, and alcohol abuse 6, 7 buy clomid for fertility Therefore, at the joints, the electrical energy becomes more focused on fewer low resistance tissues, and for this reason, these types of tissues tend to suffer the most injury at the joints throughout the body
I am really impressed with your writing skills and also with the layout for your blog. Is this a paid subject or did you modify it yourself? Anyway stay up the excellent quality writing, it is rare to look a great weblog like this one nowadays!
В этом интересном тексте собраны обширные сведения, которые помогут вам понять различные аспекты обсуждаемой темы. Мы разбираем детали и факты, делая акцент на важности каждого элемента. Не упустите возможность расширить свои знания и взглянуть на мир по-новому!
Ознакомиться с деталями – https://nakroklinikatest.ru/
Эта публикация завернет вас в вихрь увлекательного контента, сбрасывая стереотипы и открывая двери к новым идеям. Каждый абзац станет для вас открытием, полным ярких примеров и впечатляющих достижений. Подготовьтесь быть вовлеченными и удивленными каждый раз, когда продолжите читать.
Выяснить больше – https://quick-vyvod-iz-zapoya-1.ru/
Aw, this was an extremely good post. Taking a few minutes and actual effort to
produce a really good article… but what can I say… I procrastinate a lot
and never manage to get nearly anything done.
bookmarked!!, I love your site!